Anatomy of a Hard Disk Drive
Introduction
Contents
We disassembled a hard drive to show you the main components you will find on a hard drive.
Hard drives have two kinds of components: internal and external. External components are located on a printed circuit board called logic board while internal components are located in a sealed chamber called HDA or Hard Drive Assembly.
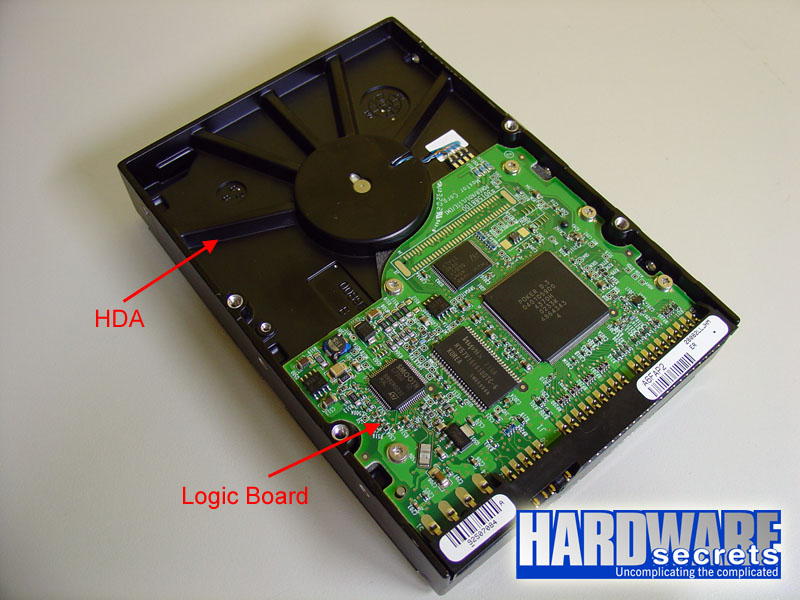 Figure 1: A Hard Disk Drive.
Figure 1: A Hard Disk Drive.
You cannot open a hard drive or you will make your drive unusable. Hard drives are assembled in clean rooms (cleaner than surgery rooms) and then sealed. Any particle of dust inside the HDA can destroy the surface of the discs, because the discs spin at a very high speed (at least 5,400 rpm nowadays). This would not only lead to data loss, but also the physical destruction of the disc surface.
So, there is no serviceable part inside the HDA – at least for the regular technician. Only data recovery companies with clean rooms can open and replace components inside the HDA. Anyway, before exploring the components located both the logic board and inside the HDA, let’s take a look at the connectors found on a regular hard drive.